My Journey into Robotics
I'm a Robotics Software Engineer passionate about building systems that move, think, and actually function in the real world.
My academic path began with a degree in Aerospace Engineering from IIT Kharagpur, India, where I first got pulled into the world of control systems. That curiosity gradually snowballed into a broader obsession with robotics, leading me to pursue a Master's in Robotic Systems Development at Carnegie Mellon University.
At CMU, I built a strong foundation across the robotics stack, working with hardware, perception, localization, planning, control, and systems integration. Along the way, I discovered a deep interest for motion planning and reinforcement learning, areas where I continue to build expertise.
I currently work at HEBI Robotics, where we build modular robots, tools, and mobile platforms designed to bring real-world autonomy to life. Our long-term vision is to make robots as intuitive and modular as LEGO blocks — enabling anyone to build, adapt, and deploy our robots to solve their problems.
Robots, Code, and Everything Between
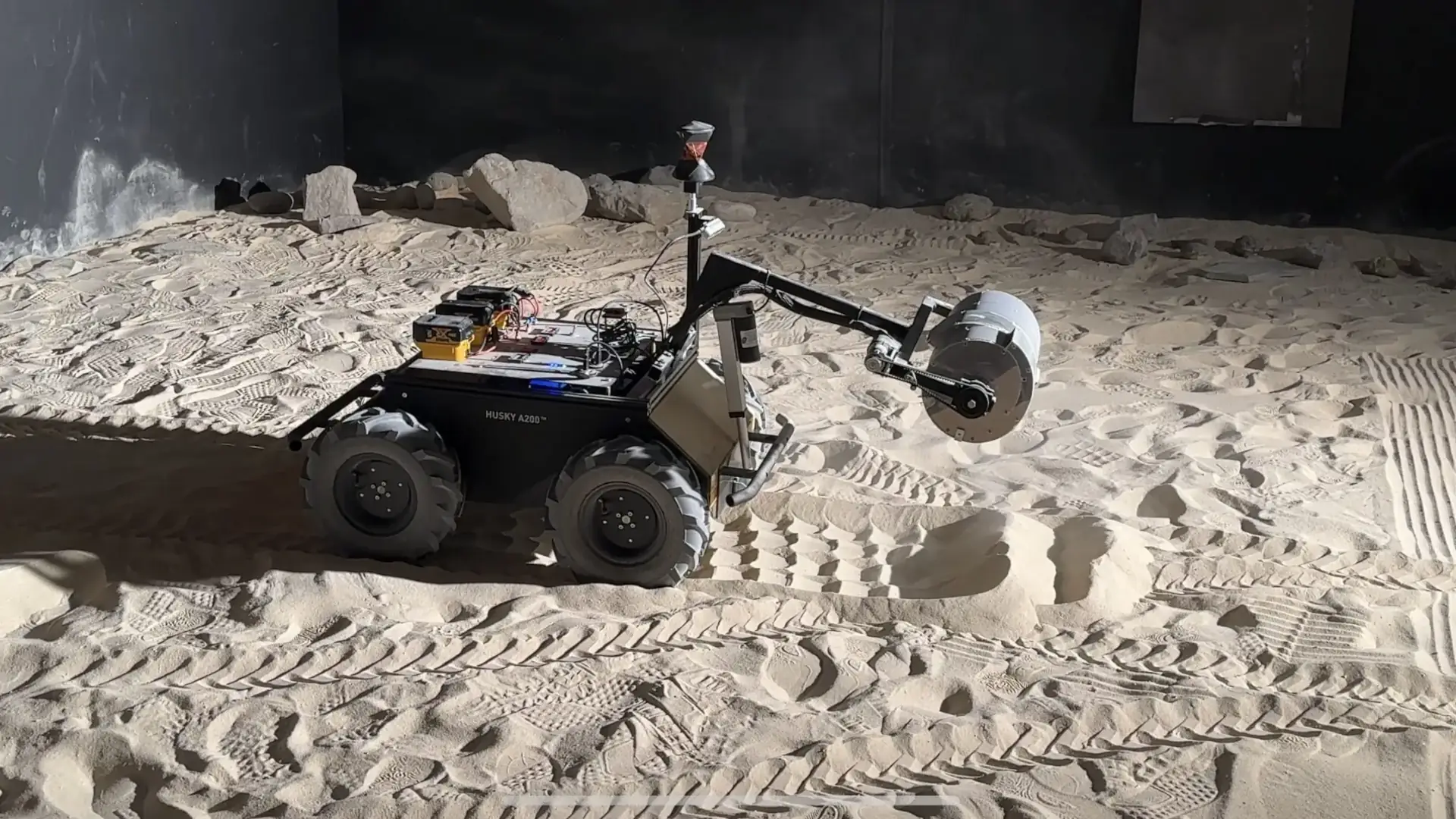
At HEBI Robotics, I've worked on a range of projects from designing a monocular visual odometry system for feature-sparse environments, to developing a modular, multi-arm mobile robot with reconfigurable tooling for soil characteristic analysis.
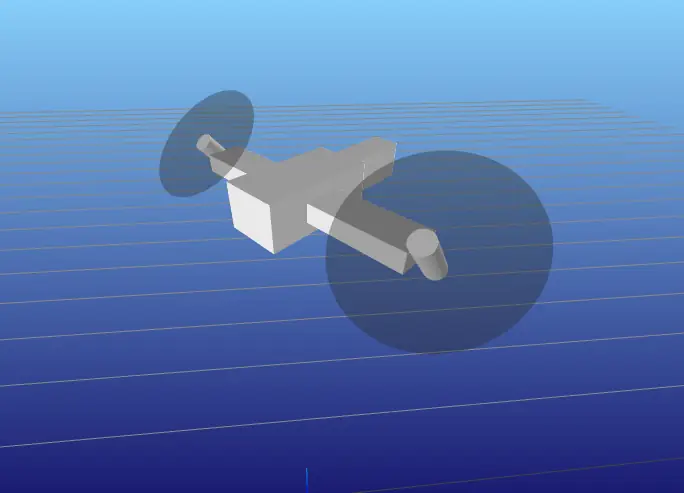
I also built a MuJoCo plugin, emulating the physical HEBI modules as virtual actuators on the network. This allows users to run the exact same control code in both simulation and on real hardware, making it easier to test, iterate, and deploy algorithms safely. Check out this demo video to see it in action.
Beyond that, I lead the development of our open-source HEBI ROS 2 APIs with support for ROS 2 Control and MoveIt!, making sure our tools are accessible, robust, and developer-friendly across the ROS landscape.
Before HEBI, during my time at CMU, I worked on several exciting projects including a lunar-terrain excavation robot as part of my year-long capstone. I also built an autonomy stack for Roboracer (formerly F1Tenth — small racecars, serious autonomy problems) and researched learning-based motion planning for off-road vehicles using self-supervised techniques.
Across all these projects, I've always been drawn to one thing: building autonomy stacks that leaves the lab and survive (ideally, thrive) in the messy, unpredictable chaos of the real world. Whether it's data-driven autonomy stacks, classical motion planning, or robot arm APIs, I enjoy building software that interacts meaningfully with the physical world.
If you want to dig deeper into the technical side of my work, check out the Projects section, or see What I'm Into Lately for my most recent experiments and side projects.
Outside the Lab
Basketball has always been a huge part of my life, and I'm a lifelong Kobe fan (yes, he lives rent-free on my lock screen). His work ethic and the way he approached the game continue to influence how I think about focus, calmness, and discipline, both on and off the court.
I grew up playing the piano and still sit down at the keys whenever I need to reset. Primavera by Ludovico Einaudi is my go-to song — mostly because it's beautiful and also since it's the only one I still remember how to play ( ´・・)ノ(._.`)
During the pandemic, I picked up chess and have been stuck in the 3-minute blitz loop ever since. It's fast, competitive, and a great way to pretend I'm sharpening my brain.

What I'm Into Lately.
Last updated: Aug 15, 2025
I finally have the time to tinker with personal projects again, and I'm starting to set a roadmap for the next few months on what I want to get done.
-
I hit the pause button on experimenting with optimizers for min-time, min-jerk trajectory generation. Instead, I started to focus on adding segment time estimation using different heuristics into the HEBI APIs. Since each heuristic has its quirks, we figured why not let users pick what works for them. This was my first time working on the core API, and it was a deep dive into a massive C/C++ codebase. I'm burning through all my C/C++ knowledge and picking up new tricks along the way as well. I even discovered there's something called
std::reference_wrapperin C++. Who knew! The feature's done now, and I'm wrapping it into the C++ and Python wrappers next. - I finished my experimentation with the LeRobot package to incorporate Vision-Language-Action (VLA) models into HEBI kits. I was able to collect a dataset, train different policies on my laptop, and test them. I trained the ACT, diffusion, and smolVLA models as they were readily available in the LeRobot package. I wanted to see how the pi0 model would perform, but it was too large for my laptop to handle. Overall, the ACT model worked well for locations close to the training data but struggled with new locations, which isn't surprising since it's an imitation learning model. The diffusion model had too long an inference time to be practical, so I was never able to test it. The smolVLA model wasn't promising either, as it failed to generate precise actions for the robot. I think this is due to the very small amount of training data and the hardware being completely different from what the model was pre-trained on. Since this was just a curiosity project, I've paused it for now, but I might revisit it later to try real-time chunking and see how that performs.
-
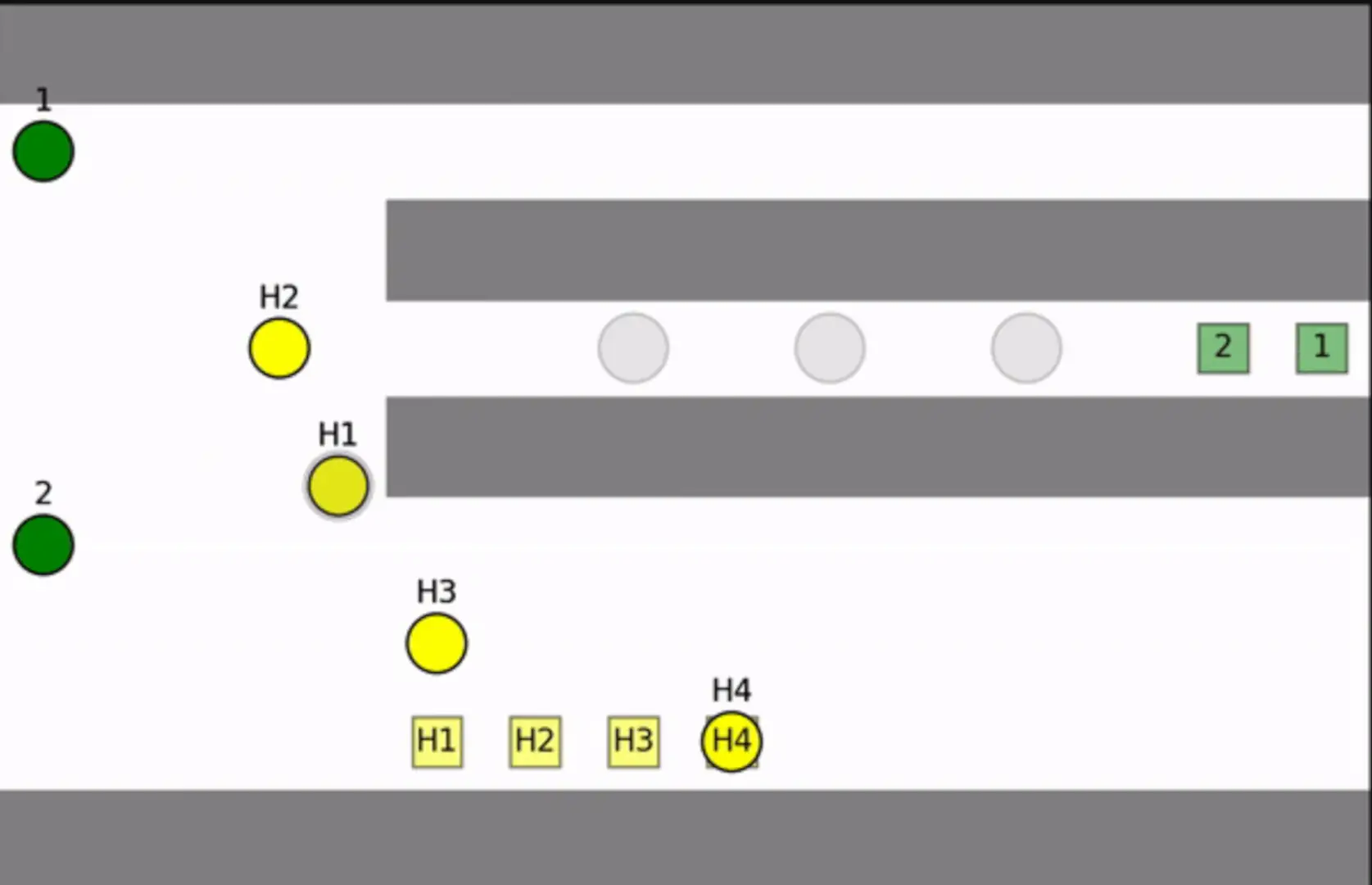
I competed in the Roboracer Sim Racing competition at ICRA 2025. I got through the qualification round using the Follow-the-Gap method (check it out here), but couldn't participate in the finals due to work. Still, it was a great experience, and I'm planning to jump back in for the next tournament.
I completed the localization and mapping modules and even implemented raceline optimization and an adaptive pure pursuit controller from my F1Tenth course at CMU. After a bit of tuning, I was able to get the car around the practice track in about 6.7 seconds, which is faster than the best qualifying time in the last tournament.
I also implemented Model Predictive Control (MPC), but it's not quite ready yet and is oscillating quite a bit. I need to figure out how to tune the cost function and constraints better, but I'm hoping to get it working in the next few weeks. - Outside work, I finally got my routine locked down and started hitting the gym again. Goal: get strong and stay basketball-ready for the long haul. Diet's actually on track too — maybe this time it sticks? (ᵕ—ᴗ—)
Overall, life's been going well and I'm loving that I'm getting back into a routine. Going to make sure it stays that way and keep embracing the grind.
Let's Connect
If you're into robotics, autonomy stacks, embodied AI or want to argue why Max Verstappen is the best driver out there, emotionally process the news of Dallas Mavericks trading Luka Doncic, or just chat about life — feel free to hit me up on any of the platforms below.